发帖赚积分积分换礼品
这里可以用于广告展示
运用你的知识帮助他们
帮助您快速入门本站点
扫一扫,关注我们
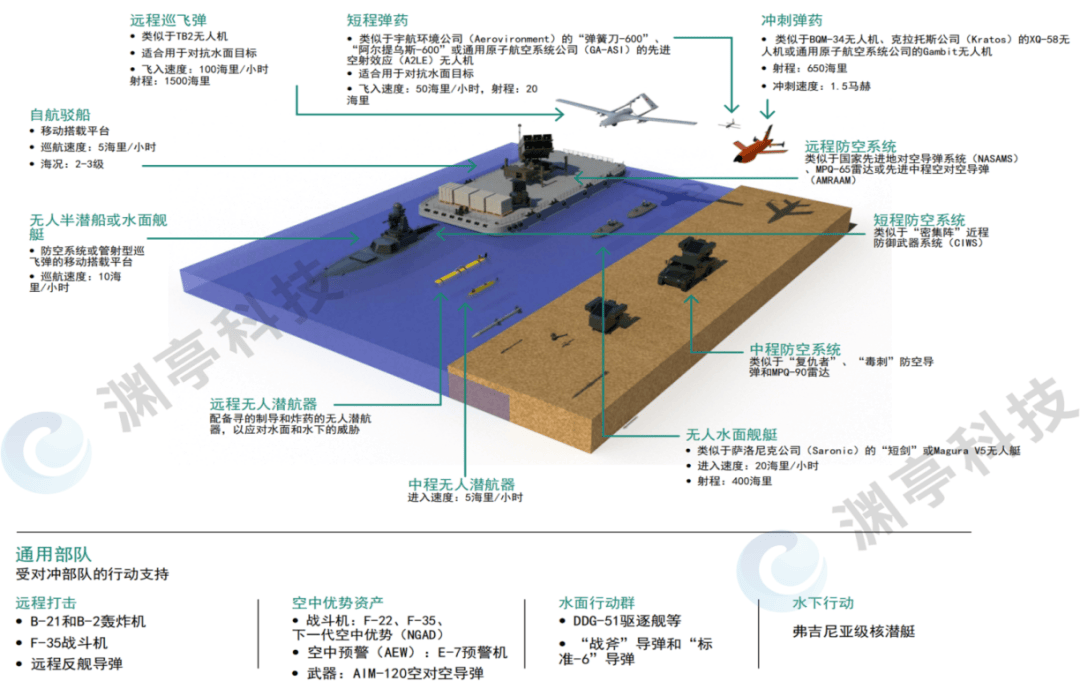
摘要:2024年2月20日,美国哈德逊研究所发布报告《对冲赌注:重新思考后统治时代的部队设计》。基于该报告前面所描述的对冲部队的概念(见“对冲部队作为美国国防规划的持久组成部分”一文),报告设想将对冲部队应用于潜在的“台海冲突”,并将台湾的对冲部队命名为“台湾壁垒动员部队”(TBAF)。本文将具体阐述上述报告假想的关于“台湾壁垒动员部队”的兵力设计、部队结构、指控与通信架构、系统集成及其演变。
关键词:对冲部队,台湾壁垒动员部队,兵力设计,部队结构,指控与通信
您需要 登录 才可以下载或查看,没有账号?立即注册
举报
主题
回答
积分
1604个回答
1456个回答
655个回答
583个回答
415个回答
在线时间:8:30-17:00
0772-5288688
下载APP客户端