无人机的核心,个人浅见是在飞控以及各种传感器上面。
大家常说的无人机算法,一般也指的是无人机飞控算法,包括姿态控制之类的。现在很多厂家也开始用ADRC之类的去替代传统的PID。
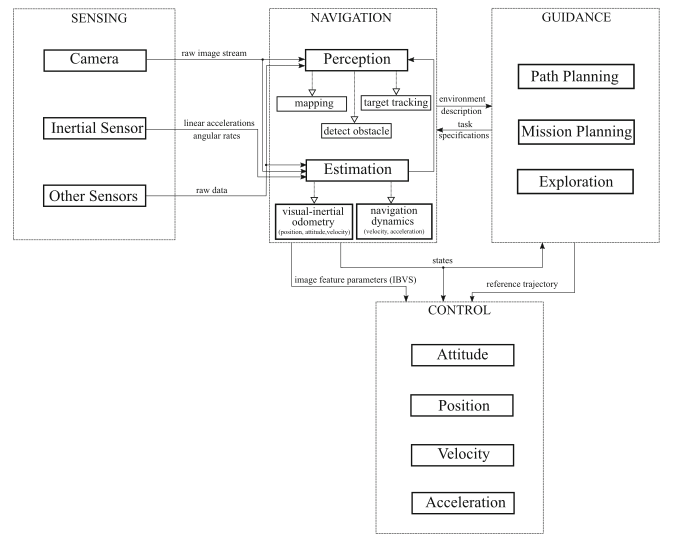
传感器包括加速度计,陀螺仪,GPS, 压力传感器定高,毫米波雷达和RGB融合避障等。气压计可以定高,也可以通过毫米波雷达定高,考虑到冗余和可靠性,现在的无人机都是走多种传感器技术融合的趋势。
本人一直从事的是BLDC的无感FOC算法开发,通俗的说,就是无人机的电调开发。所以谈一谈电调开发的关键技术。
电调相当于无人机的肌肉,属于最后端的执行机构,执行飞控发出的命令,输出足够动力,保证平稳飞行。大风等恶劣天气时能够悬停,抗风。
对于电调控制,现在基本都是无感FOC技术。相比于传统的方波控制技术,FOC低噪音,响应快,转矩平顺。FOC可以实现速度环,电流环的双闭环,收发自如。很多人讲FOC,就容易提到SVPWM,SVPWM仅仅只是DC-AC的一种逆变方式,还有SPWM等其他方式。
FOC的原理很多人讲过,容易陷入理论,本人就用最简洁的方式描述其特点。

根据电机的运动方程,或者最通俗的牛顿运动定律,  代表电机轴输出转矩, 代表电机轴输出转矩,  代表轴的负载转矩。所以对电机调速,实际目的就是精确控制电机的 。 代表轴的负载转矩。所以对电机调速,实际目的就是精确控制电机的 。
 代表电机惯量,即牛顿运动定律里的惯性。 代表电机惯量,即牛顿运动定律里的惯性。  代表电机速度的微分,即电机的加速度。所以当 代表电机速度的微分,即电机的加速度。所以当  , 电机的加速度为正, 电机加速。当 , 电机的加速度为正, 电机加速。当  ,电机减速。当 ,电机减速。当  ,电机处于恒定速度。只要能控制 ,就能控制电机加速、减速、或者停留在当前速度。对电机的核心,实质是控制电机轴上输出的力,能够与负载的力实现动态平衡的过程。 ,电机处于恒定速度。只要能控制 ,就能控制电机加速、减速、或者停留在当前速度。对电机的核心,实质是控制电机轴上输出的力,能够与负载的力实现动态平衡的过程。
FOC的特点,以电机的转子磁场位置作为角度,对电压,电流作坐标变换,再构建速度和电流两个双闭环,最后通过SVPWM计算实际输出的占空比,实现了对 的精确控制。
对于无人机的FOC控制,基本都是无位置传感器,所以必须通过电压,电流,电机参数来估算当前位置。估算控制的精度,决定了对 的控制精度,进而决定了电调的控制性能。
本人做过几个无人机电调无感FOC的项目,分享一下最后实现的FOC控制性能。
14s电池,植保机测试平台视频:
<a href="http://www.zhihu.com/zvideo/1418595871102038016" data-draft-node="block" data-draft-type="link-card">尤其使用的M0实现,对比现在市场上常见的STM32F4系列,C2000系列性价比优势很大。
常见的植保机,一般是14s电池,48VDC电池供电,电池充满到55VDC左右。拉力从20公斤到40公斤不等,开关频率一般20kHz.
快速加减速,动态性能好,速度和电流响应快:
暴力加减速
暴力加减速
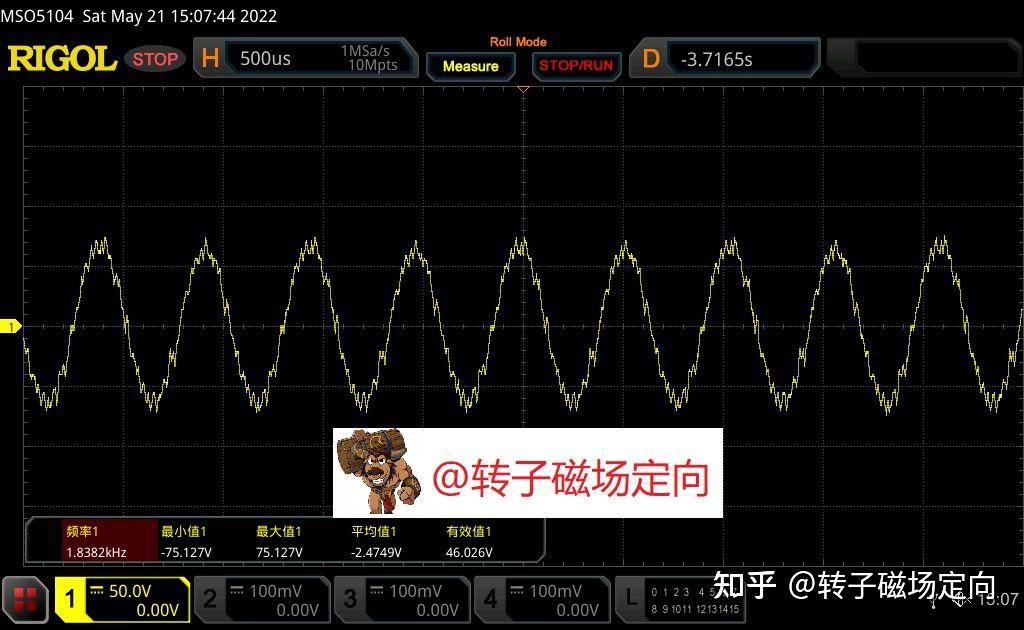
900Hz同步速下的高正弦度相电流:
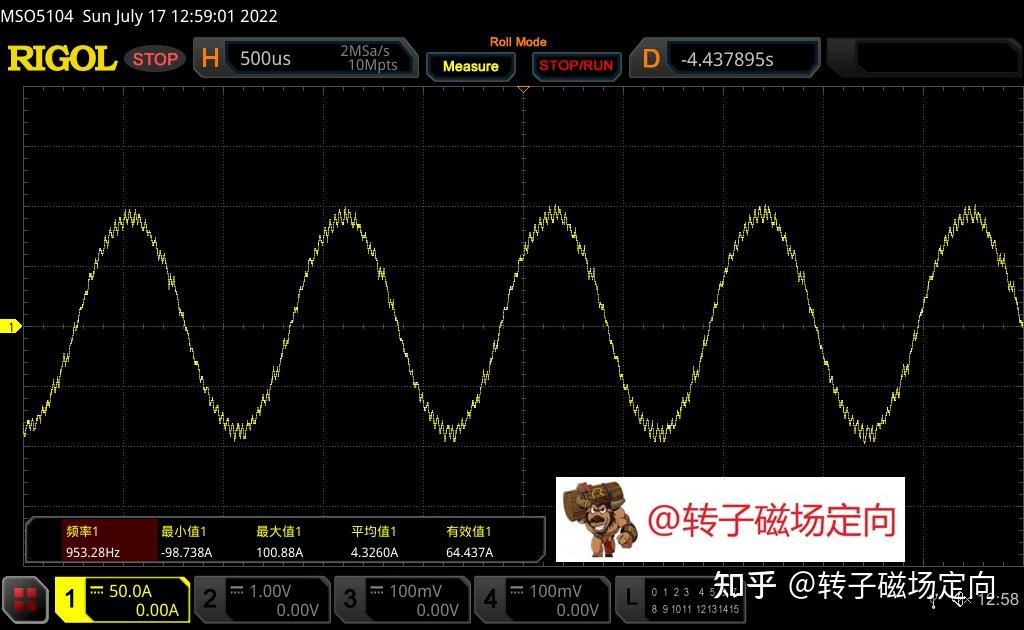
900Hz相电流
快速加速,电流响应快,从20A上升到100A大约50ms:
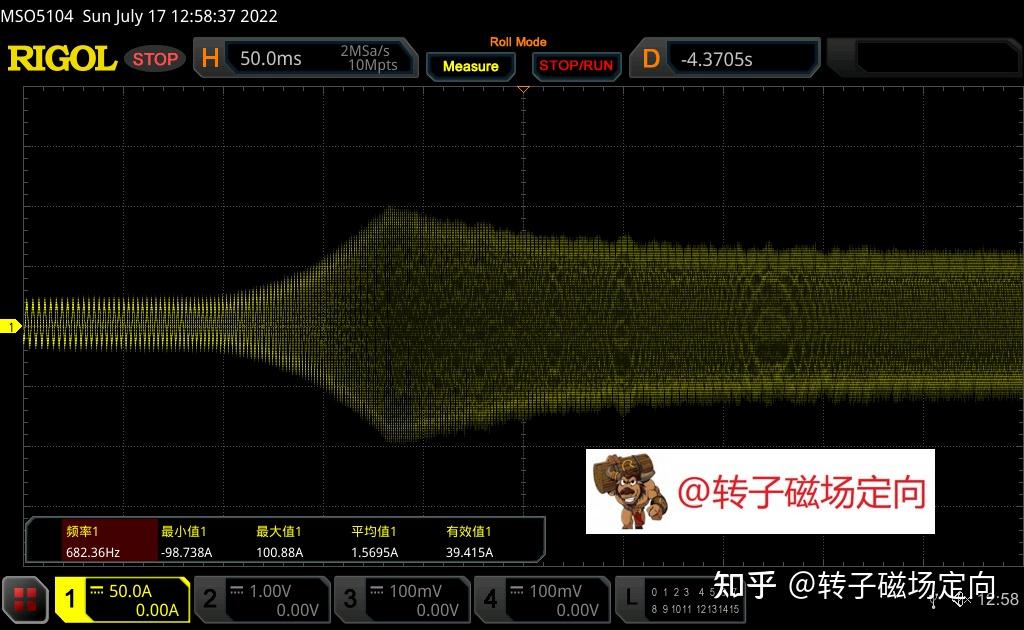
FOC可以精确控制并限制转矩,大电流下不失步:
加速限流
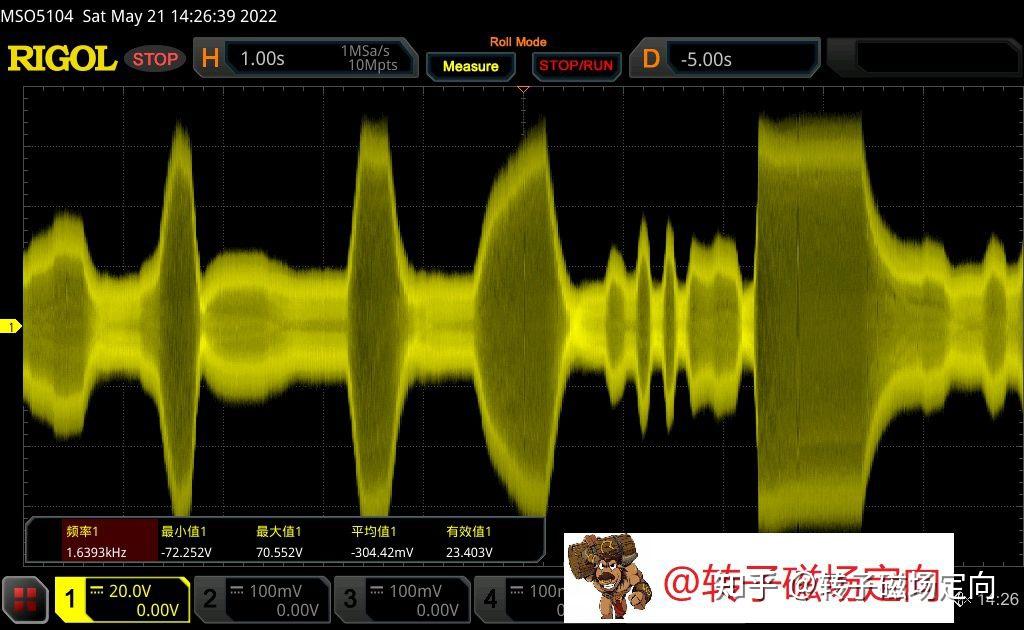
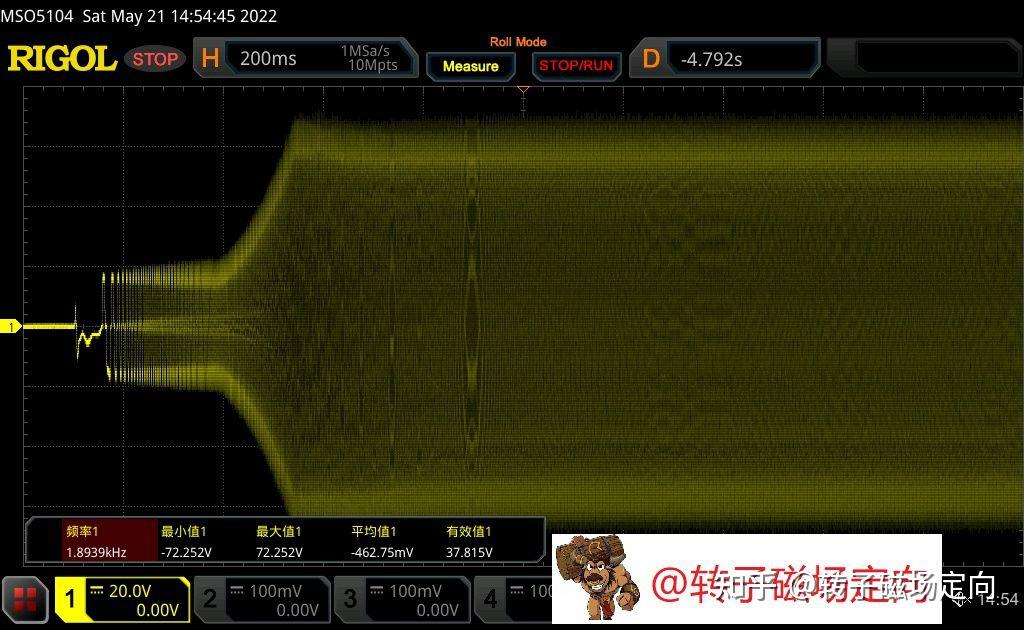
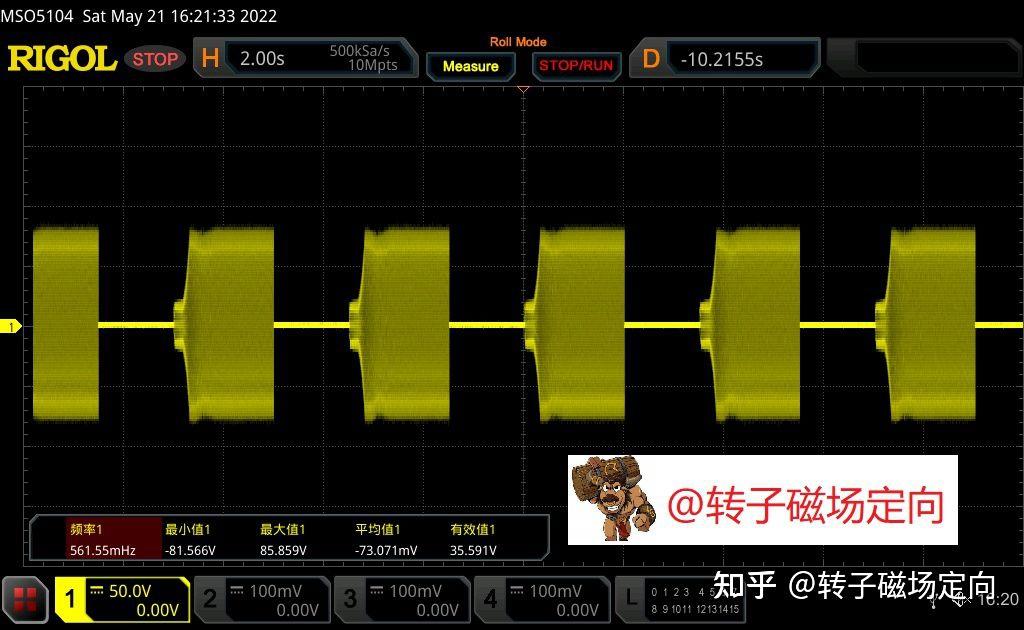
高达2200Hz的顺风启动,自由停机后能够平滑实现顺风启动,没有任何冲击。
连续顺风启动
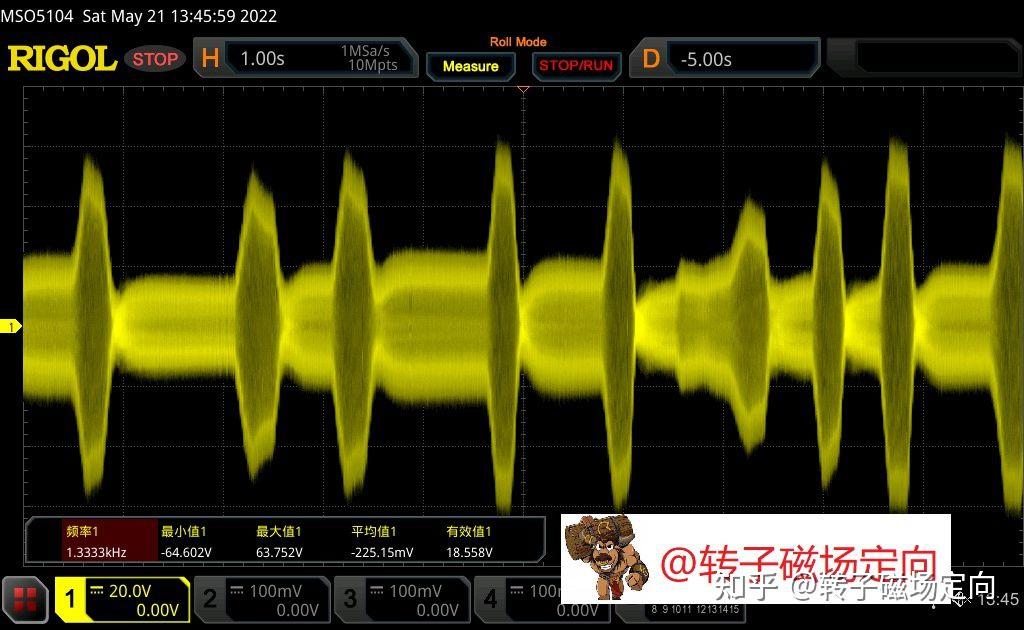
高速下停机再启动
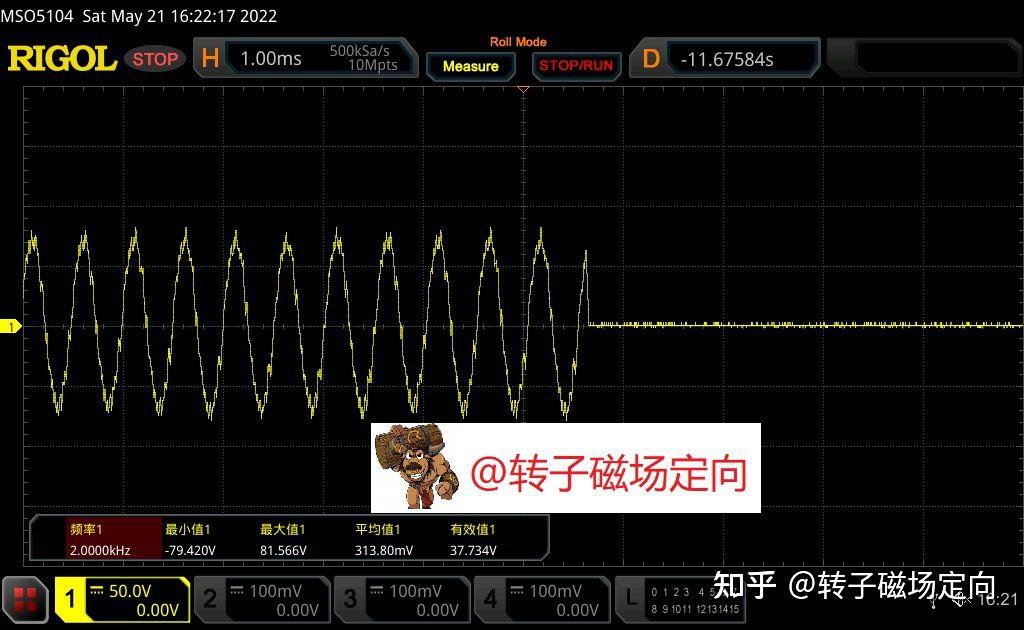
FOC角度估算精度高,2000Hz的同步速,仅仅需要20kHz开关频率即可实现高性能控制,波形正弦度高。
1800Hz下的高分辨率
以上是FOC控制的关键技术。
下面谈谈电调硬件设计的难点。首先48VDC电池供电,充满电到55VDC,硬件关键器件MOSFET和driver一般选80V耐压,有些客户保险会选择100VDC。英飞凌等进口品牌比较常见。
电源IC,可选择的品牌很多,TI的比较常见。
MCU一般以C2000和STM32的M4核居多。
一般行业机,对成本相对敏感一些,进口的MOSFET比较少。但是到了植保机尤其大功率的植保机,基本还是进口的器件居多。
主要原因是大功率的电调,要考虑可靠性,尺寸,散热等等。所以硬件设计的难点,在于平衡性能,尺寸,散热,可靠性以及成本做出综合的选择。硬件上想打造一款能够大批量量产的电调,说实话并不比FOC开发要容易。
比如MCU换成M0系列,在缺货的背景下可以节省不少成本,但是对FOC开发能力要求很高。
国产MOSFET现在做得很不错,但是追求极致尺寸的大功率应用下,其可靠性还有继续提升的空间。 |