现今的人工智能研究中,家居智能是一个非常具有挑战性的应用场景。但是,随着科研工作者的不断努力,家居智能在近年来也是突飞猛进地发展。
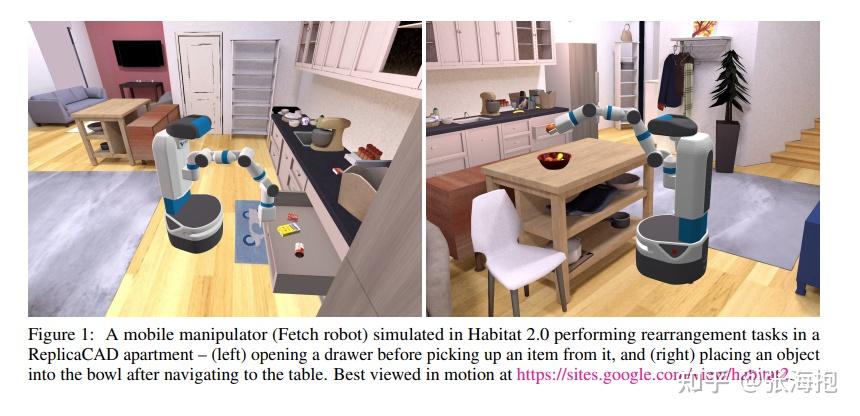
在模拟环境中,研究者们已经开始探索全能型的家居机器人
其实,家居智能代表着这样一类人工智能范式——
具身智能(Embodied AI)
这个概念在上个世纪被提出,随后成为了AI领域大家努力的一个重要方向。具身智能其实是在回答这样一个问题:相比于人类,传统以预测、生成为核心的人工智能(这里称作旁观智能),还缺少一些什么?
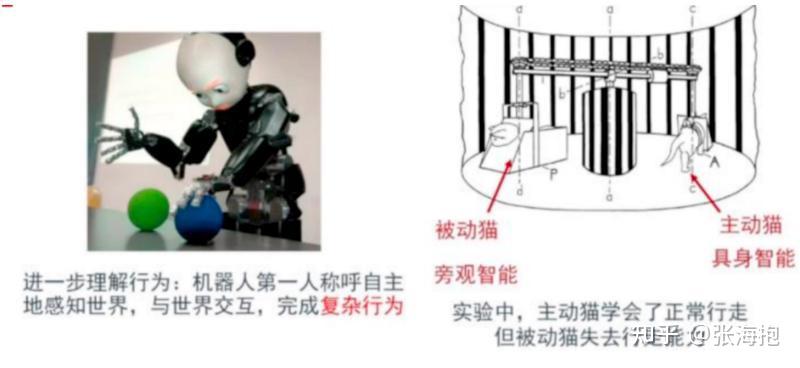
其差别就在于,人类的智能活动是站在第一人称视角的,而旁观智能是站在第三人称视角。比如,人类或者机器人就属于站在第一人称视角来看世界的,并且可以对世界产生实体动作;而人脸识别技术、天气预报模型则是站在第三人称视角来观察世界的。

来源:机器之心科技年会
具身智能其实是更高层次的一种智能形式,它要求智能体去主动探索世界、摸索环境规律,并且做出正确的决策去适应环境。以下图中的这个实验来看,传统的旁观智能就像其中这一只被绑起来的猫,它只能被动观察;即使来到这个世界很久,也无法获取行走的能力。相对应地,具身智能就好像另外一只可以自由行走的猫,通过摸索自己身体与外界交互的规律,获得行走、奔跑的能力。
来源:机器之心科技年会
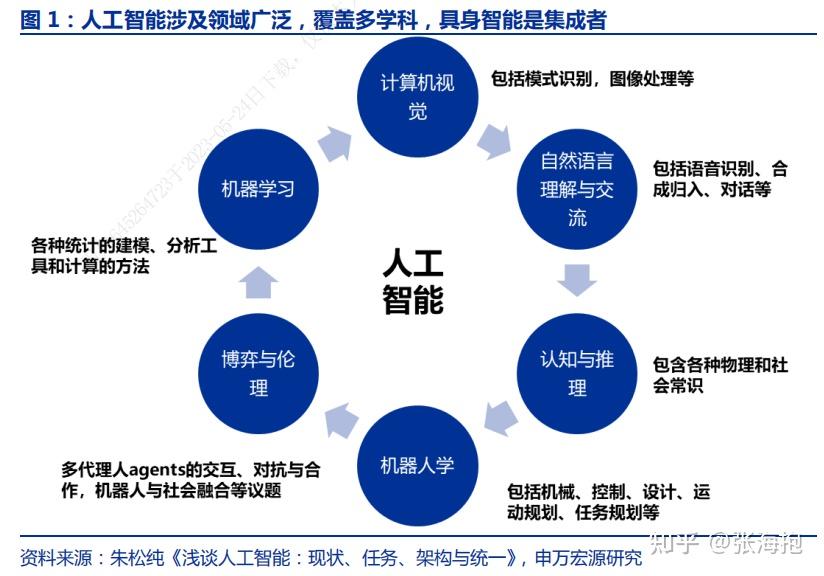
当然,要做到具身智能并不容易,它的实现几乎需要人工智能中的所有子领域的参与,从计算机视觉、自然语言处理、强化学习到底层的机器学习算法、机器人硬件等。这些环节都必须协同起来,才能得到一个好的具身智能实现。
但是,这样的具身智能其实已经初见雏形,并且早已迭代发展了几十年。大家在日常生活中,也已经能体验到这样的具身智能 ——
家用扫地机器人
我最近也在家里也是购买了一台科沃斯扫地机器人,使用后不禁感叹,现在的扫地机器人的智能程度都已经这么高了嘛!内置的避障、规划、决策算法效果都非常好,这给我们这些前沿的科研工作者压力很大呀!
下面就带大家一起来了解一下,高度智能的扫地机器人究竟是怎样炼成的?
一、软硬结合,让扫地机器人更加智能
说起智能,少不了硬件和软件的协同配合。
扫地机器人的工作模式其实就是一个典型的强化学习范式。
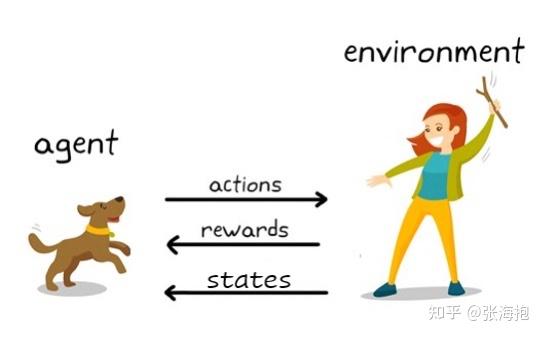
强化学习与训练宠物类似,通过工程师的训练,扫地机器人变得更加聪明
强化学习是机器学习的一个分支,相比于大家熟悉的有监督学习范式(比如图像识别、语音识别),它更注重的是决策,而不仅仅是预测。以扫地机器人为例,强化学习刻画的是如何有效地对于房间观察、对房间进行建模,并且从而做出自适应的决策,以完成我们交代给它的任务。
在强化学习的的视角下,扫地机器人的决策包含以下一些环节。
感知、建模、决策、执行
1、感知——好视力是决策基础
感知模块就好像人的眼睛,如果视力不行,后面再怎么努力也不好使。对于扫地机器人来说,它有的可不止一双眼睛,而是有多达四十多个传感器。
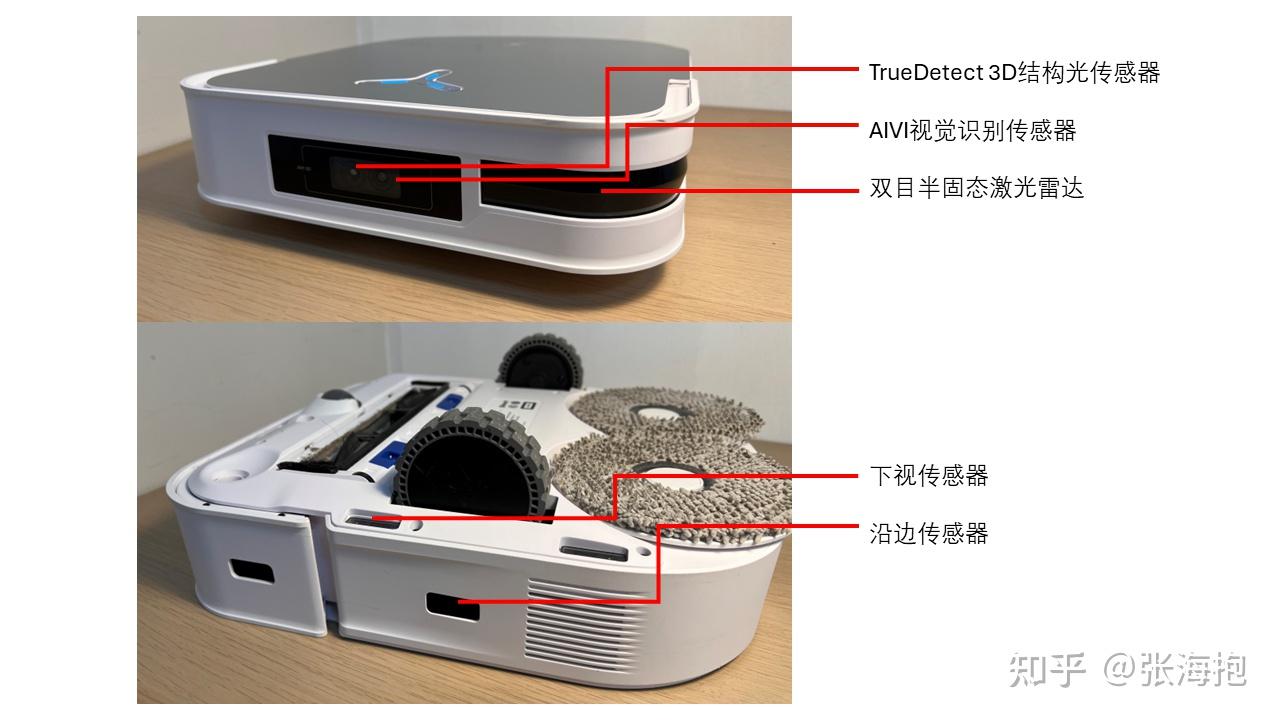
可以看到,科沃斯扫地机器人除了前面的 AIVI 视觉识别传感器和 TrueDetect 3D 结构光传感器之外,还在侧边和下方分布了大量的感应器,来帮助扫地机器人更加全面的了解周围的环境。
更值得一提的是,科沃斯的这款扫地机器人引入了半固态激光雷达,这是行业首创。
对于自动驾驶关注比较多的同学们应该都听说过激光雷达,它是现在主流智能汽车中最重要的传感器。
为什么需要用半固态激光雷达呢?
首先,激光雷达的最大的优势在于其分辨率高。
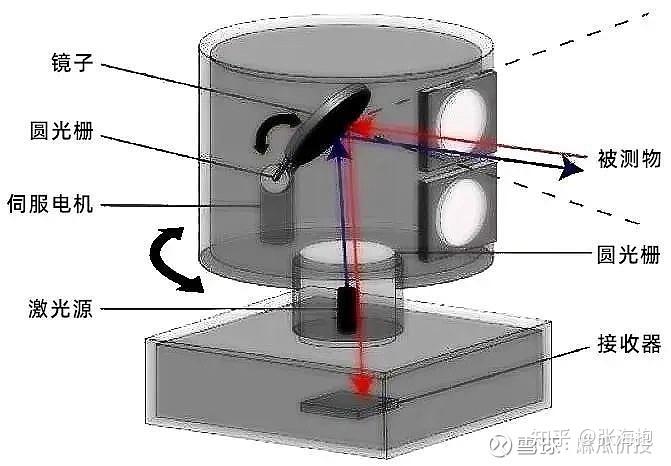
最早的激光雷达是机械式的。机械式激光雷达的原理就是通过旋转的透镜来进行各个角度的激光扫描,从而快速地对于周围的环境进行建模,即目前扫地机器人上普遍使用的LDS及dToF技术。不难看出,机械式激光雷达由于要装下这个活动式的结构,不仅会导致其体积庞大,而且没法很好地被嵌入机身。对于扫地机器人来说,这意味着机械式雷达需要凸起一块,不仅增加了机身身高,降低了通过率,也更易损坏,减短寿命。
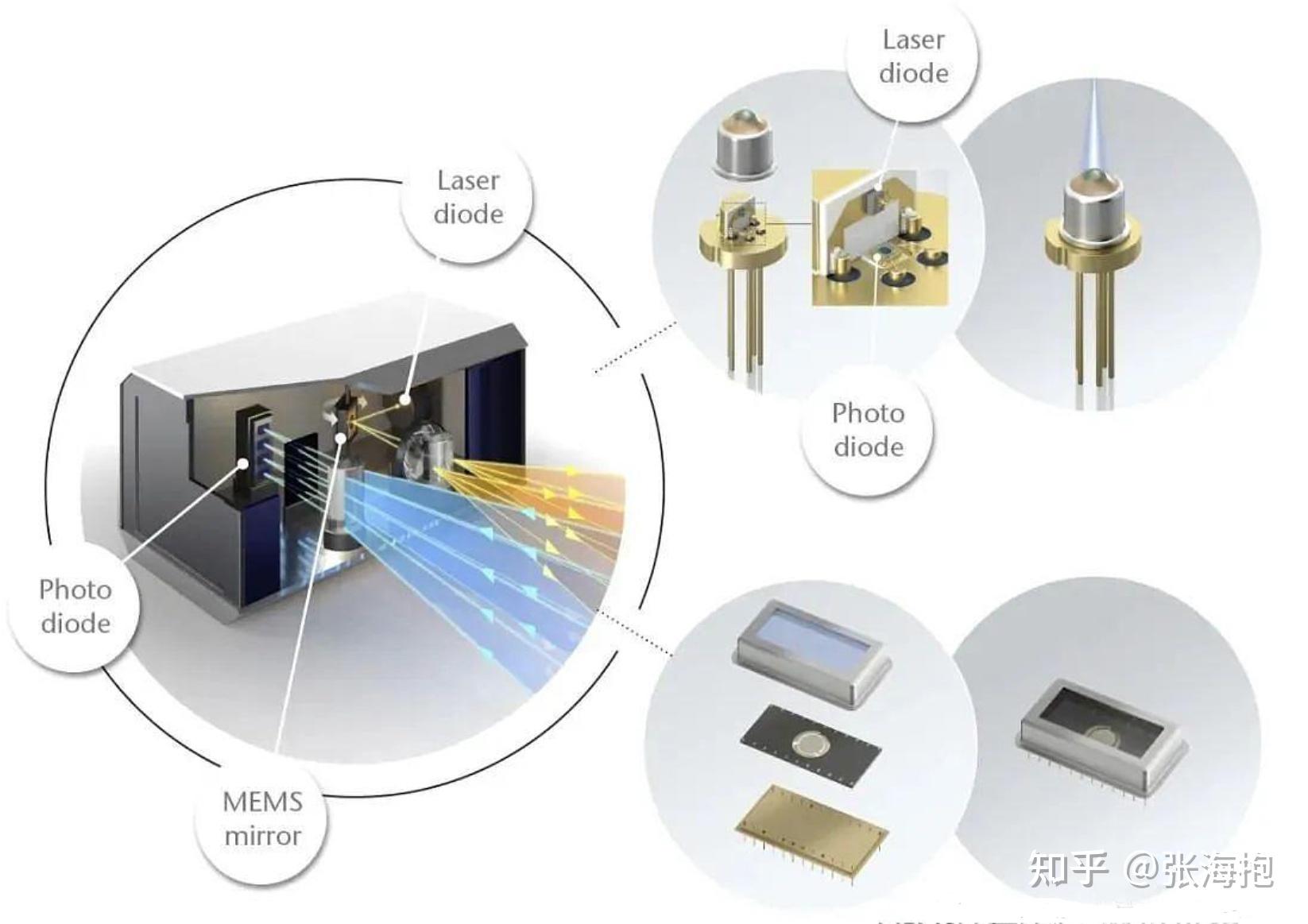
而接下来就发展出了半固态激光雷达。它去掉了容易损坏的马达和多棱镜等模块,不仅提高了设备的使用寿命,而且也能够减小设备的体积。取而代之的是使用MEMS(Micro-Electro-Mechanical System)微振镜,可以在激光发射端的轻轻波动激光,实现对于光束的操纵。MEMS 微振镜是一项成熟的技术,集成度高,寿命长。
对于扫地机器人来说,这样的半固态激光雷达能够有效降低机身高度,极大地增加了机身通过率,使其能够轻松钻入床底或者沙发下等人很难清洁到的地方,将它们打扫干净。
此外,科沃斯采用的是自主研发的超广角半固态激光雷达,实现了210°超大视场角,嵌入式设计不仅降低了机身,采用的全封闭式设计,达到 IP5X 防护等级,能够有效防止灰尘进入雷达本体内,延长激光雷达的寿命。科沃斯还对于激光雷达的光路进行了全新设计, 可以保证透光罩刮伤的情况下不影响雷达功能,虽然为首次应用半固态激光雷达,但做了各种调教及更为成熟的处理,创新实为不易。
2、建模——随时随地知道身在何处
当然,光有好的眼睛也不行,机器人还需要基于观察来感知室内环境,对房屋进行建模。
为什么需要建模?
首先,需要让知道那些地方可以清扫,哪些地方是家具或者是墙体。
其次,更关键的是,房屋建模需要能够帮助机器人去规划打扫房间的顺序。就像保洁阿姨来到家里一样,也是需要先观察一下房屋构造。先打扫楼上,再打扫楼下,先打扫里屋,再打扫客厅,最后打扫卫生间。
可以说房屋建模是机器人清扫规划的基础。
此外,科沃斯扫地机器人还配备有语音控制的功能,比如,你可以说:“去打扫一下厨房。” 这时,扫地机器人就需要依赖对于房屋的建模来知道厨房究竟在哪里?走什么样的线路去厨房打扫卫生?

https://www.zhihu.com/video/1675534024326574080
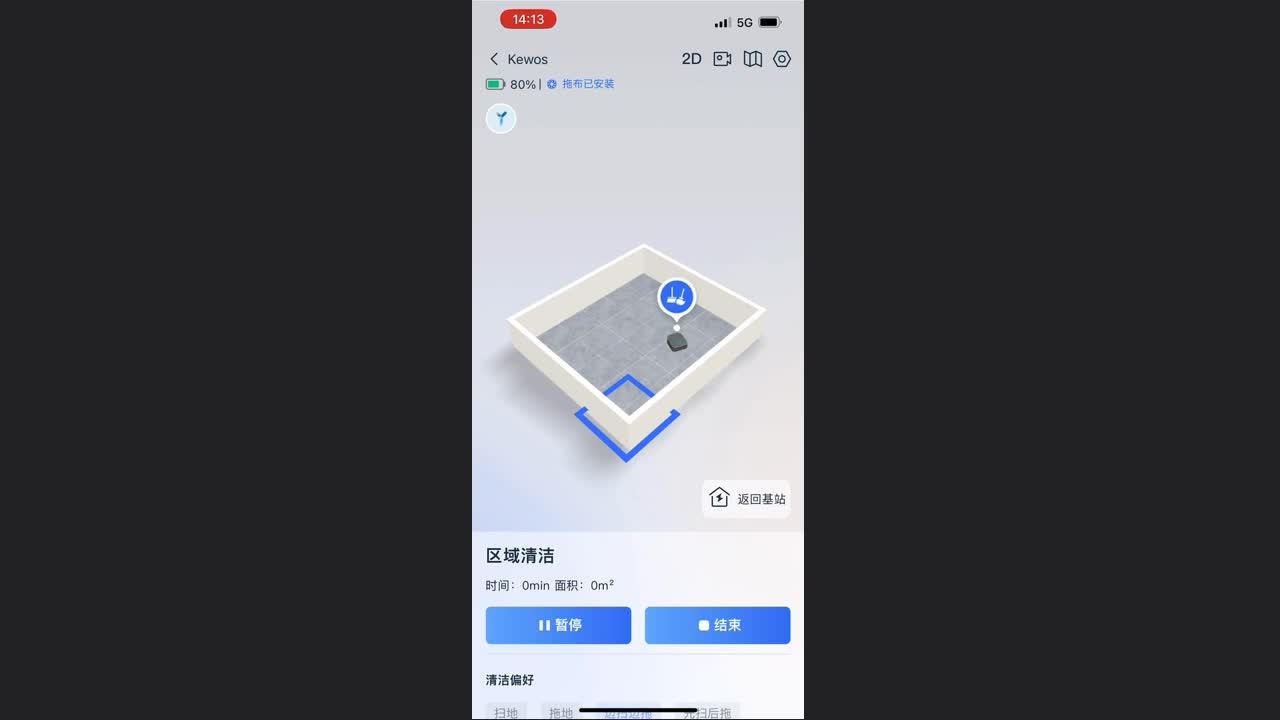
甚至我们还可以在地图中直接拖动机器人进行定点打扫,都归功于有建模为基础。
https://www.zhihu.com/video/1675534258377207808
如何把传感器收集到的数据转化为对于房屋的模型呢?
这中间就需要最先进的人工智能相关的算法了。一般是先将激光雷达的数据转化为点云(point cloud),然后再根据点云来重构虚拟房间。
以城市测绘为例,得到的点云长下图这样,不同颜色的点代表相应的点的不同高度。
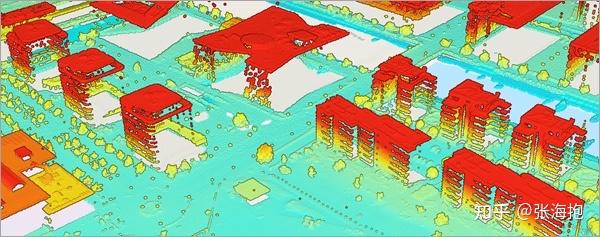
然后需要根据点云的不同形状去对其做智能识别,从而区分出楼房、树木、道路等。

扫地机器人的建模原理也是类似的。比如,科沃斯扫地机器人中有内置了 3D 地图的技术,来帮助重建。比如,下面这张地图就是科沃斯扫地机器人智能重建出的地图,不仅能识别出来房间的墙体,而且能识别出来具体的家居类型和位置。

3、决策——智能的大脑非常关键
对于扫地机器人来说,好的决策算法必不可少。不仅需要全局的规划,而且需要能够自适应地处理突发情况,比如躲避障碍物和宠物等。
在规划方面,需要做的是对于可能的路径进行搜索,并且找到最优的一条线路。但是如果穷举所有的路径,然后再进行评估,会消耗天量的计算资源,根本不可行。因此,人们发明出来了启发式搜索算法,即优先搜索看起来比较靠谱的路径。
下面这张动图就演示了科沃斯扫地机器人所采用的 A* 算法,它是目前效果最好的一种启发式搜索算法之一。可以看到,为了找出通往目标绿点的最优线路,算法从先按照走直线的思路去搜索。但是马上就发现会碰到障碍物,因此就再尝试从障碍物两边绕过去。最后通过一些搜索尝试,发现从右边绕到目标点最为有效。
但是,这样的路径规划算法适用的是静态的场景,但房间中是存在动态的人或者宠物的,而且椅子、桌子的摆放也可能会发生变化。这就要求机器人也不能一味地按照规划的路径来清扫,而是也要实时避开障碍物,及时调整清扫方案。
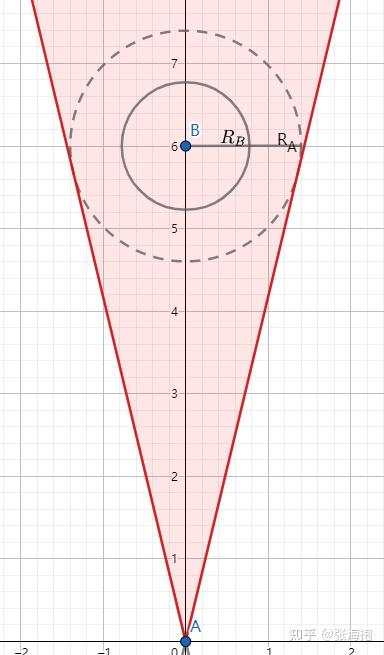
如何保证机器人不会撞到人呢?假设下图中的 A 点位机器人,以 B 点为中心的实心圈为移动中的人,那么机器人就会把图中的红色三角区看做是危险区域,停止进入这个区域。注意到,红色区域的范围比人体范围更大,这是为了考虑人可能的运动轨迹,因此增大了避让范围。
这个算法的名字就叫做 VO (velocity obstacle),没错,记住这个 V 型的避让区域和O 型的避让圈就好!
当然,我们这里介绍的都是最为基础的规划和避障算法,实际的扫地机器人使用的算法会更加复杂,当然效果和性能也会更好。
4、硬件——优秀的算法也需要强大的芯片
不管是建模还是决策,都需要巨大的运算量。比如,在建模中,需要同时处理成千上万的点云,从而构建相应的环境模型。再比如,在决策中,需要以非常高的频率对环境中会突然出现的物体(比如突然出现的猫咪)进行检测和避让。
这些运算量需要算力强大的芯片来支持。比如科沃斯扫地机器人中就配备了旭日3 芯片。它是专为自动驾驶、机器人设计的芯片,其中包含了专门为雷达数据处理、快速决策设计的模块,具有高性能、低能耗等优点。

二、精雕细琢,打造灵活而强大的拖扫一体机器人
当然,对于扫地机器人来说,最重要的是什么?
当然是能扫干净!但是想要做到这件事情,除了智能之外,基础的清扫硬件和反复打磨的设计必不可少。科沃斯从 1998 年创立至今,就一直在迭代优化相应的硬件和软件。让我们看看现在科沃斯最先进的家用扫地机器人的技术实力如何吧。
更薄更窄的方形机身
扫地机器人使用的时候主要痛点有两个:不够到、扫不净。
第一个痛点是够不到——够不到怎么打扫干净?家庭环境千差万别,床下、椅子下方、狭小的走廊等等。这导致,在很多时候机器人根本没法走到相应的位置。
因此,必须把机器人做的足够薄、足够窄。

机器人能够轻易扫净床下区域
但是,这并不容易。因为机器人的内部包含吸尘器、抹布、传感器、电池、水箱、集尘盒等在内的各种模块。必须要通过反复迭代优化,才能设计出来合理的排布方式,这很考验出品公司的工程水平。
另外,机器人的形状设计也很有讲究。早期的扫地机器人大多采用圆形的设计。为什么是圆形呢?在扫地机器人发展的早期,算法还没有那么智能,为了简化防磕碰和避障等相关算法,因此就是用圆形这样一种完全中心对称的设计。此外,圆形扫地机器人也不容易对人体或者家具产生磕碰。
但是圆形的扫地机器人也有很大的问题,那就是在墙角处会产生大块的漏扫面积。相比之下,圆角方形就成为了更优的方案。它在减小磕碰损伤的基础上,也增大了墙角墙沿的清扫效率。

科沃斯X2的方形机身,可以做到99.77% 的边角覆盖率。

圆角方形的设计使其能够扫净房间角落
第二个痛点是扫不净——我们不希望机器人在污渍上面来来回回扫半天,结果脏东西还是没被清除。科沃斯X2如何做到这一点呢?——吸、擦
对于干垃圾(比如猫砂、头发)来讲,我们所需要的是内置吸尘器强大的吸力。
而科沃斯X2下方能产生的压强是多少呢?答案是 7500 帕,这样的吸力大小足以把地面的灰尘、头发等吸走。像我家最近使用状态,所过之处,散落在地面的猫砂片甲不留,十分治愈。

强大的吸力使得科沃斯扫地机器人能够轻松扫净地毯
对于顽固的污渍怎么办呢?那就要靠擦洗了。
我们想想人类是怎么把顽固污渍擦洗干净的呢?用力把抹布“怼”在污渍上方来反复擦洗,对不对?科沃斯扫地机器人也能能模拟出这样的下压效果。它使用雪尼尔双拖布,模拟人手进行按压湿拖,使拖布紧贴地面。与此同时,拖布还进行着旋转运动,轻松擦除顽固污渍。

擦洗干净地板的同时还能避让猫咪
三、指哪扫哪,更方便的语音控制助手
现在 ChatGPT很火,它是一种大语言模型。相比于之前的对话系统来说,它能回复任何你任何的问题或者要求。
当这样强大的大语言模型和具身智能相结合的时候,将会变得更为强大。比如最近,Google DeepMind团队做出来的RT-2 就是这样的一个多用途的智能体。它不仅能够回答问题,而且还能遵循人类指令去完成控制任务。
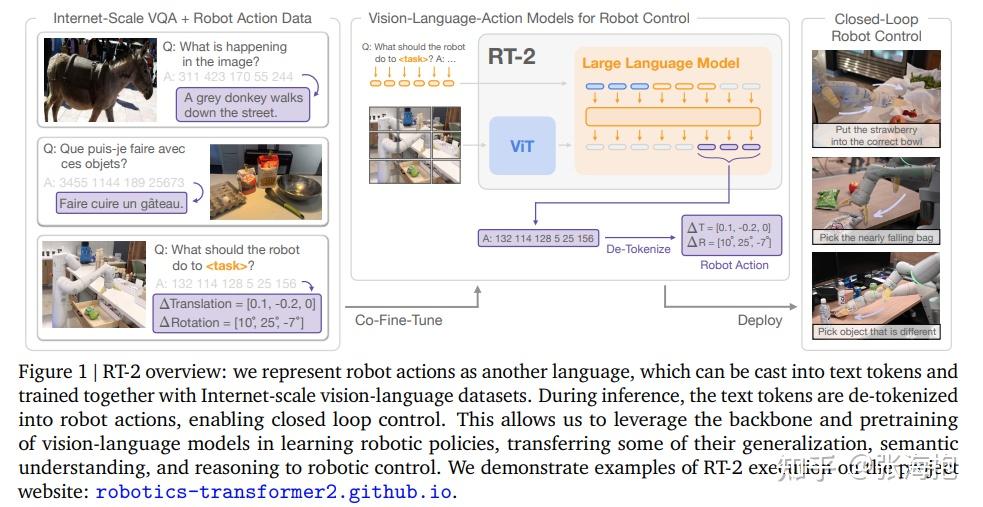
好消息是,科沃斯扫地机器人也能够让我们体验到这样的技术了。正如我在前文演示的,我们可以直接通过和它进行对话,不仅能够让它去返回基站、建立地图、清扫特定区域等,而且还可以问它一些简单的问题,比如天气、时间等。
最后,给大家强烈推荐我最近购买的这一款科沃斯扫地机器人。
首先,它智能程度十分高,采用都是目前最先进的人工智能算法和模型,不仅交互省心,而且智能扫净,无需过多人工干预。
更重要的是,其硬件设计非常给力,扫拖一体,有效穿梭于房间,把各个角落都打扫地干干净净。
这些产品效果都得益于科沃斯多年的技术积累,毕竟也是从上个90 年代就开始专注这个行业的品牌了,值得信赖!
这款产品已经发售,可以通过下方链接购买: |



