“我们发明了飞机,而不是模仿鸟类做了扑翼式飞行器。 ”
这句话一般用来劝退:告诉你这条路走不通。
不过到底为什么不行?
我还真觉得这是个好问题。
不是抬杠。 是真的认真去思考过的:扑翼式非常节能,信天翁可以连续飞15,000 km, 相当于休斯顿到澳大利亚西南。这是个好东西。不过为什么不做?
我的答案是:科技达不到,人造扑翼飞行器所需要的技术是另外一个层面上的天顶星科技。
下面是分析:
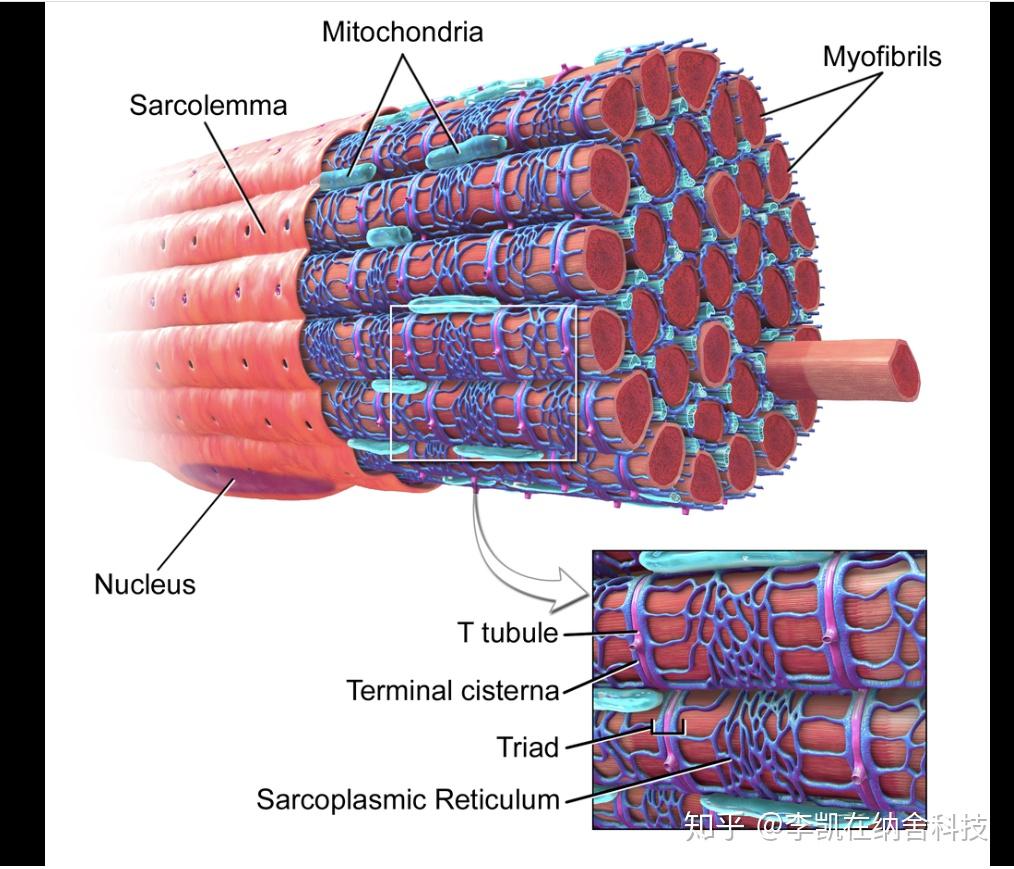
- 驱动器科技达不到。 我们还没有人造肌肉或者是柔性驱动器 。wiki上说这是有破坏性的创新 : Due to their high flexibility, versatility and power-to-weight ratio compared with traditional rigid actuators, artificial muscles have the potential to be a highly disruptive emerging technology. Though currently in limited use, the technology may have wide future applications in industry, medicine, robotics and many other fields.[2][3][4]。 也看到有人说这个是机器人科学的圣杯。 肌肉有很好的特性:分布式的驱动方式和供能方式,线粒体就像是分布式电池一样供电,所以瞬时的总功率非常大, 如果是目前单一供能的机器人架构很难达到这个电流,同样体积重量下, 你不需要变压器的线圈, 不需要大的能炸死人的电容去提供瞬时的供能。

张伟丽@UFC 一拳打出500磅力量
- 控制器:柔性驱动器的问题是控制起来很难, 因为控制的不是单一的马达,而是一群, 而且是很大一群。 比如笑一下需要控制26个肌肉群, 每个肌肉又是有很多纤维构成,控制不好就成面瘫。 比如我们站立和行走的肌肉群, 都需要单独控制但是又要有协同,否则就是帕金森。
打网球发球动作的受力分析
肌肉群
这个分布式的架构有非常好的鲁棒性,坏掉一两根完全没有关系,依然可用,今天我落枕了,不过我还是能够摇头对你说不的。
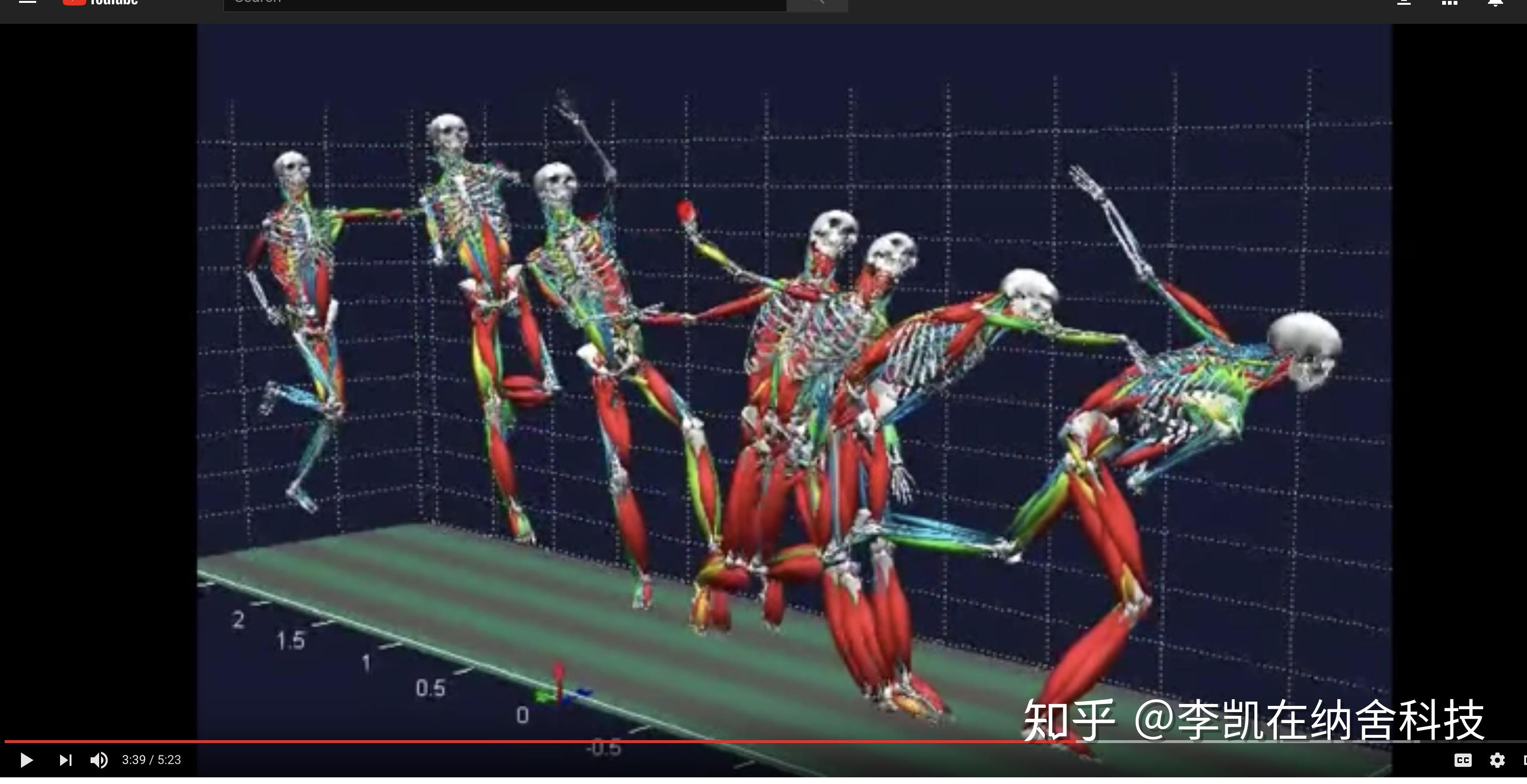
够快够强够灵活

https://www.youtube.com/watch?v=ER15KmrB8h8
- 传感器: 飞行的时候,并不是一个刚体,重心随时变化,简直就是飞行器设计的噩梦, 而且运动并不是在一个平面上的二维运动,是空间中的3维运动,如何能够保证不坠毁,你需要非常多的传感器。比如蝙蝠。
https://www.zhihu.com/video/1245912598920560640
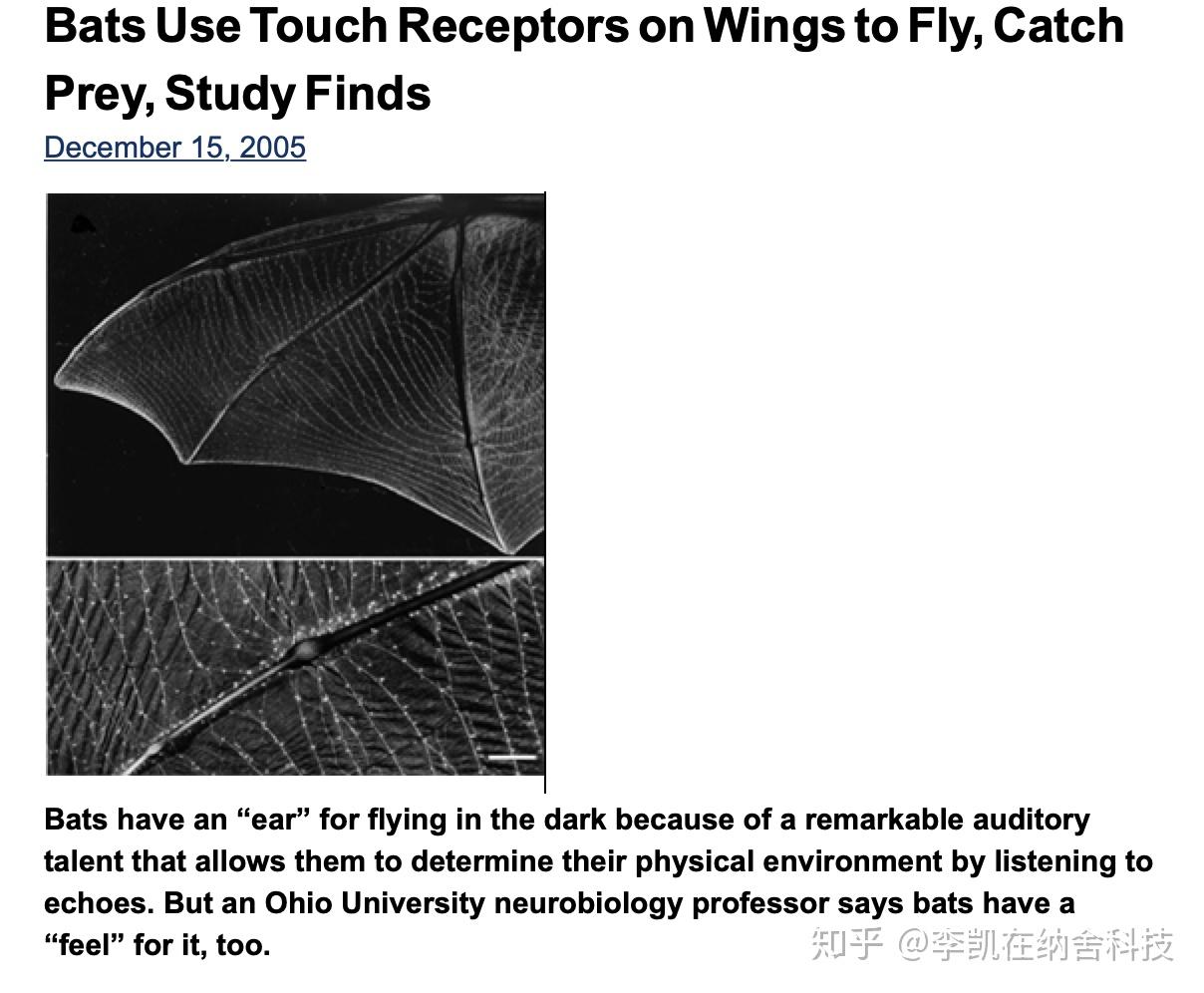
Bats Use Touch Receptors on Wings to Fly, Catch Prey, Study Finds 蝙蝠翅膀上密集的传感器
我们能够很好运动离不开超多的传感器。

手指传感器密度https://pages.jh.edu/jhumag/495web/touch.html
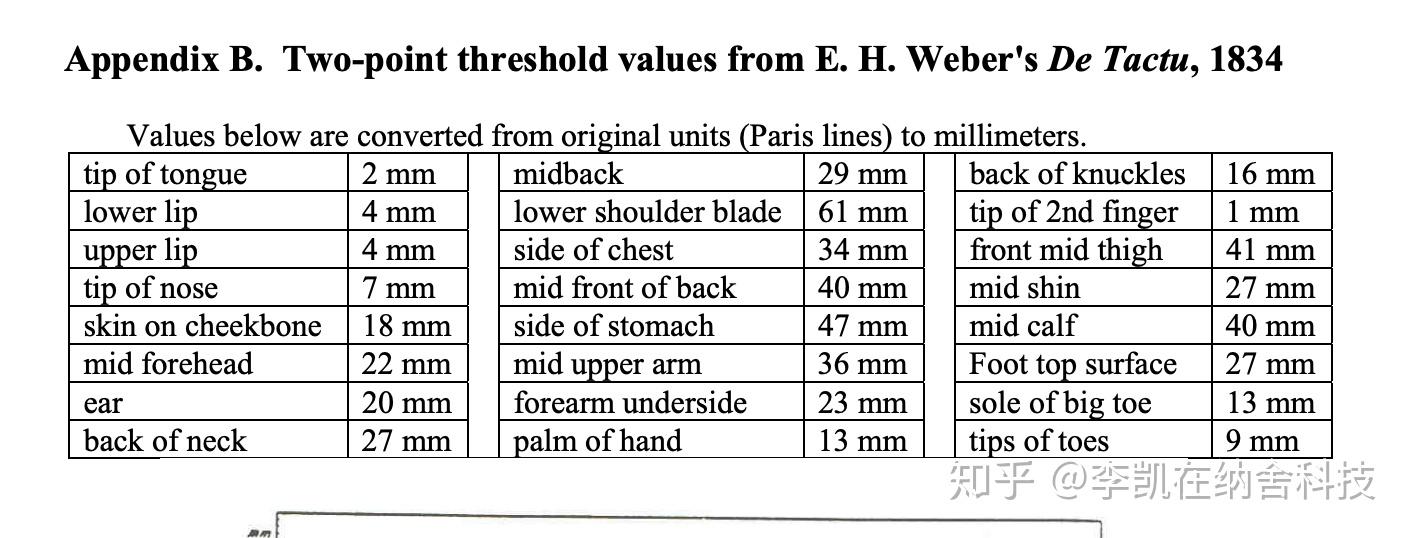
其他部分的密度http://web.as.uky.edu/Biology/faculty/cooper/bio350/Bio350%20Labs/WK13-temp%20Lab/skin%20map%20Human-partC-page%207.pdf
可以这样理解,你9千的Iphone里面只有一个MEMS重力感应器, 而你身上,每根毛发都是,还有皮肤上的压缩也能告诉你重力的方向。
更不用说眼睛里面的传感器单元,Rod用来感受运动的, 120000000个。 Cone感受边缘的7000000个。

https://www.khanacademy.org/test-prep/mcat/processing-the-environment/sight/v/vision-summary
好玩的是你的耳朵,有很多组感应细胞,每组对特定的频率有响应。 而目前我们的量产设备麦克风都不是这种设置, 麦克风是一个单一的传感器,通过高频采样获取到时间的序列,然后通过FFT(快速傅里叶)转成 频域。这个体现了人类设计和造物主设计的非常不一样的地方。

https://www.khanacademy.org/test-prep/mcat/processing-the-environment/sound-audition/v/auditory-processing-video
- 决策和控制理论: PID Controller一般用来控制驱动器, 电脑出现前这个算“智能设备”,比如电饭锅的控温器。
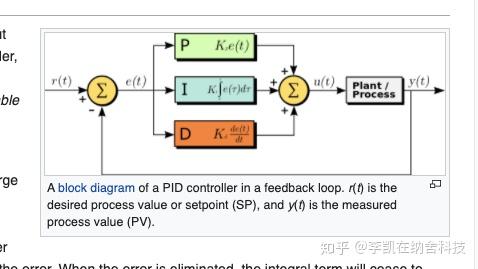
这个用来控制一个 驱动器,最多几个驱动器还可以,但是对于上面说的那种集群驱动器就歇菜了。 PID其实就是一个小的Back Propagation的实现, 有另外一群人把这个BP玩出了另外一个境界,那就是深度学习社区。
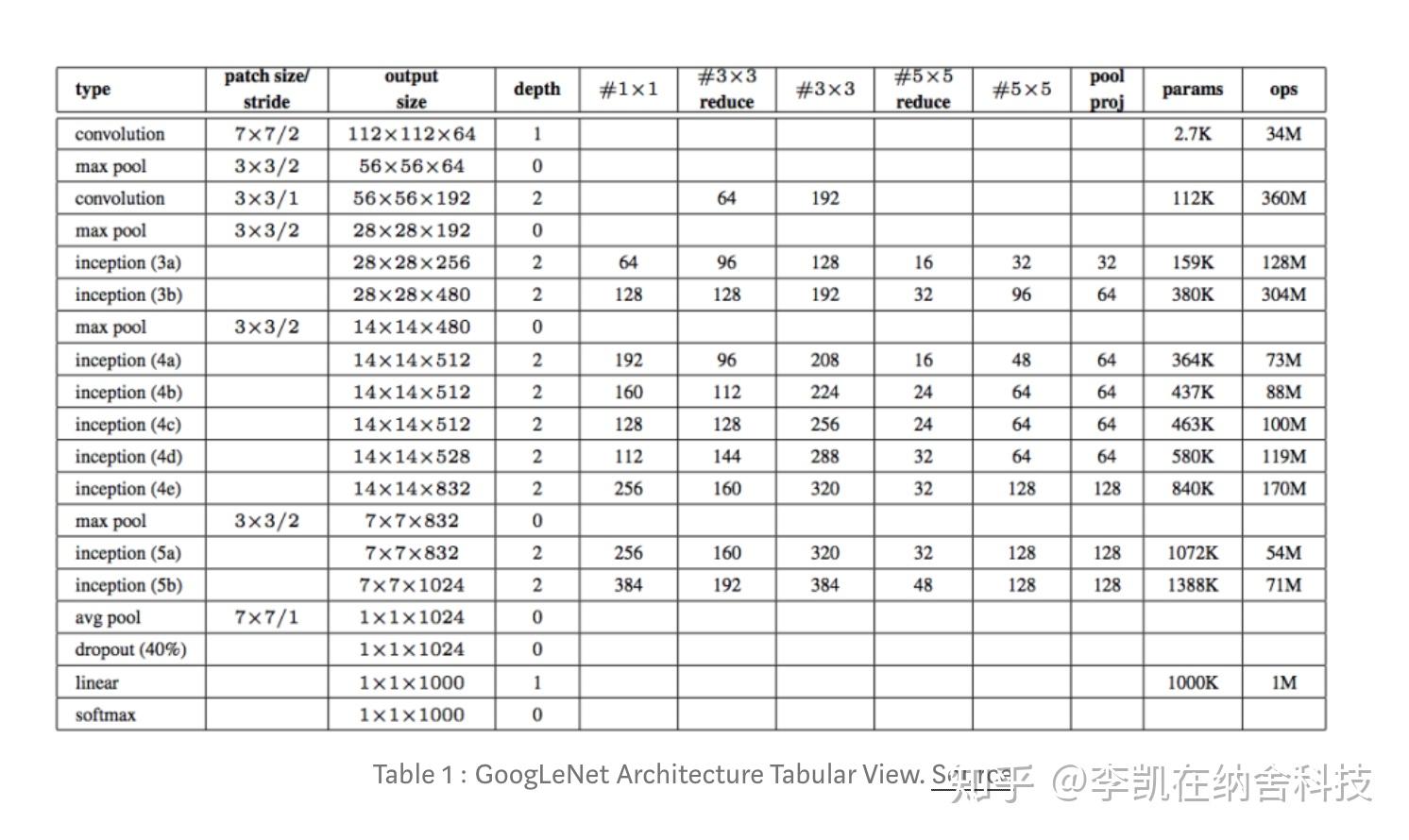
https://medium.com/@RaghavPrabhu/cnn-architectures-lenet-alexnet-vgg-googlenet-and-resnet-7c81c017b848
目前人类顶尖的机器人复杂环境下的挑战赛, DARPA Robotics Challenge 2015, 基本代表了目前水平

失败集锦
https://www.zhihu.com/video/1245879486174142464
链接
这个和波士顿动力拍片剪辑大法不一样-拍100次,剪一次出来发油管做广告不一样, 实拍的, 基本代表最高真实水平。
- 计算能力:带宽和运算能力,这么多输入和输出。计算能力肯定少不了。不过好像目前的计算机 架构并不能很好支持这种计算。
- 结构研究 : 比如鸟翅膀上的羽毛,在各个地方都是不一样
对比下动物界非凡的控制系统
所以。
“我们发明了飞机,而不是模仿鸟类做了扑翼式飞行器。 “ ?????
补充, 经评论指正,能离地的扑翼飞行器是2006年在UTIAS制造出来了 。我想在原文中添加一些定义可能更好地说明本文的初衷: 是像鸟、蝙蝠、苍蝇一样灵活的、节能的、空气动力学上更加节能的, 更加安静的扑翼飞行器 。
UTIAS飞行器就像其他任何模仿鸟儿飞行的扑翼飞行器一样, 是一个尝试,但是除了“扑翼”这个很形式很表象的行为的模仿之外, 没有任何深入的思考和对鸟类的观察, 而文章头上所说“我们发明了飞机,而不是模仿鸟类做了扑翼式飞行器。 ” 正是对这种形式化肤浅模仿的批判。
我们需要更加深入地去观察鸟类。 这里提供更加多的资料供大家参考。
- 以鹦鹉飞行为例子,介绍了翅膀形态变化-张开收缩在飞行中的运用。在翅膀下压的时候张开提供上行动力,在上摆的时候收缩,通过翼尖的特殊化摆动,竟然也能在翅膀上摆的时候提供向上的推力。太惊艳了https://www.youtube.com/watch?v=4jKokxPRtck

飞行中的柔性翅膀
https://www.zhihu.com/video/1250944199584419840
- 蜂鸟飞行时,骨骼形态的控制https://www.youtube.com/watch?v=JyqY64ovjfY

https://www.zhihu.com/video/1250948637112360960
- 蝙蝠的高超飞行技能-贴地飞行https://www.youtube.com/watch?v=iQ6rlmODL9Y

https://www.zhihu.com/video/1250954777070526464
- 蝙蝠的高超飞行技能-原地180度转弯https://www.youtube.com/watch?v=OLhTrLh3CMU

https://www.zhihu.com/video/1250955643202416640
- 蝙蝠翅膀上的神经系统https://www.youtube.com/watch?v=DFkcUtpa9hI
https://www.zhihu.com/video/1250954930556960768
- 鸟的肌肉系统和骨骼关节的配合, 羽毛的外形的作用, 呼吸系统的特异化

https://www.zhihu.com/video/1250955445097287680
- TED-苍蝇怎么飞行,看点是空气动力学的电脑计算模拟。大脑只有100000神经元,却可以藐视任何人类飞行器的控制系统

https://www.zhihu.com/video/1250955756708982784
- 飞行的魔术https://www.youtube.com/watch?v=e_44G-kE8lE

https://www.zhihu.com/video/1250957556869885952
- 超级精细的羽毛的结构, 结构精细到和可见光的波长一样,导致了光的衍射,产生了孔雀羽毛上的颜色(最多十个视频,接下来只能放链接了)

- 和人类的手的结构的对比https://www.youtube.com/watch?v=ANH58bvQq14

总结下,主要还是要”可控制的“飞翼, 如这种


其他扑翼飞行器的尝试也这里补充下,这些都是在气动外形上和运动形式上类似自然界的飞行的。
Festo
Harvard John A. Paulson School of Engineering and Applied Sciences 的小昆虫 |



